dynamics2d_footbot_model.h File Reference
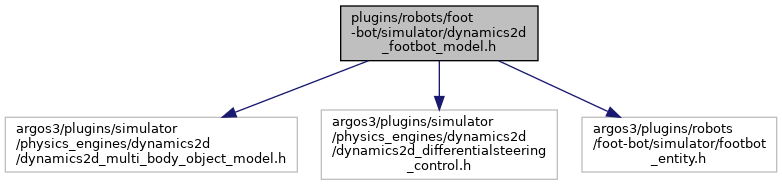
#include <argos3/plugins/simulator/physics_engines/dynamics2d/dynamics2d_multi_body_object_model.h>#include <argos3/plugins/simulator/physics_engines/dynamics2d/dynamics2d_differentialsteering_control.h>#include <argos3/plugins/robots/foot-bot/simulator/footbot_entity.h>
Include dependency graph for dynamics2d_footbot_model.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | argos::CDynamics2DFootBotModel |
Namespaces | |
| argos | |
| The namespace containing all the ARGoS related code. | |