Installation
To install ARGoS, you need a package from the Download page, or you need to compile the sources from GitHub.
For the time being, we tested ARGoS in Ubuntu/KUbuntu (32 and 64 bits), OpenSuse (32 and 64 bits), and MacOSX (10.6 Snow Leopard and newer). Windows is not supported.
Ubuntu and KUbuntu
Download the right package for your architecture and type at the command prompt:
$ sudo dpkg -i argos3_simulator-*.deb
The dependencies should automatically be checked. Optionally, you can install the POV-Ray package to activate the high quality visualization plug-in.
OpenSuse
Download the right package for your architecture and type at the command prompt:
$ sudo rpm -i argos3_simulator-*.rpm
The dependencies should automatically be checked. Optionally, you can install the POV-Ray package to activate the high quality visualization plug-in.
MacOSX
To be able to use ARGoS, you first need to install the latest version of XCode. This is necessary to compile the examples and your future experiments. In addition, for the examples you need to have CMake and GSL. The easiest way is to install them through Homebrew. Install Homebrew, open up a terminal and type:
$ brew install cmake $ brew install gsl $ brew install qt
After this, you can install the ARGoS package as any other OSX package.
If you wish to uninstall ARGoS, just type this command in a terminal window:
$ sudo /usr/share/argos3/uninstall_argos.sh
Running ARGoS for the first time
To test your ARGoS installation, you need to download the examples. You’ll find a README file that will guide through the features of ARGoS in a tutorial-like fashion.
To test ARGoS, get the examples, compile them and launch the most basic experiment available, diffusion_1.argos:
$ cd argos3-examples # go into example dir $ mkdir build # create build dir $ cd build # go into build dir $ cmake .. # setup compilation $ make # compile $ cd .. # get out of build dir $ argos3 -c experiments/diffusion_1.argos # launch experiment
A man page covering ARGoS' command line options is available:
$ man argos3
Using ARGoS: Basics
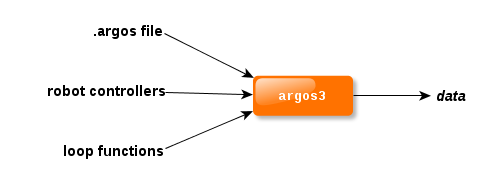
To use ARGoS, you must run the command argos3. This command expects you to provide two kinds of input:
-
An XML configuration file, typically with extension .argos
-
User code compiled into one or more libraries
The configuration file contains all the information to set up the arena, the robots, the physics engines, the controllers, etc. User code includes robot controllers and, optionally, hook functions to be executed in various parts of ARGoS to interact with the running experiment.
The experiment configuration file
General structure
This is an example of the skeleton of the ARGoS configuration file:
Warning: Undefined array key "KEYWORDS" in /home/argos/public_html/www/php/geshi.php on line 2020
Fatal error: Uncaught TypeError: array_keys(): Argument #1 ($array) must be of type array, null given in /home/argos/public_html/www/php/geshi.php:2020 Stack trace: #0 /home/argos/public_html/www/php/geshi.php(2020): array_keys() #1 /home/argos/public_html/www/php/geshi.php(2162): GeSHi->build_parse_cache() #2 /home/argos/public_html/www/user_manual.php(117): GeSHi->parse_code() #3 {main} thrown in /home/argos/public_html/www/php/geshi.php on line 2020