angles.h File Reference
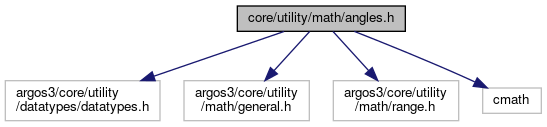
#include <argos3/core/utility/datatypes/datatypes.h>#include <argos3/core/utility/math/general.h>#include <argos3/core/utility/math/range.h>#include <cmath>
Include dependency graph for angles.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | argos::CRadians |
| It defines the basic type CRadians, used to store an angle value in radians. More... | |
| class | argos::CDegrees |
| It defines the basic type CDegrees, used to store an angle value in degrees. More... | |
Namespaces | |
| argos | |
| The namespace containing all the ARGoS related code. | |
Macros | |
| #define | ARGOS_PI 3.14159265358979323846264338327950288 |
| To be used when initializing static variables. More... | |
| #define | ARGOS_SINCOS ::sincosf |
| #define | ARGOS_SIN ::sinf |
| #define | ARGOS_ASIN ::asinf |
| #define | ARGOS_COS ::cosf |
| #define | ARGOS_ACOS ::acosf |
| #define | ARGOS_TAN ::tanf |
| #define | ARGOS_ATAN2 ::atan2f |
Functions | |
| CDegrees | argos::ToDegrees (const CRadians &c_radians) |
| Converts CRadians to CDegrees. More... | |
| CRadians | argos::ToRadians (const CDegrees &c_degrees) |
| Converts CDegrees to CRadians. More... | |
| CRadians | argos::NormalizedDifference (const CRadians &c_angle1, const CRadians &c_angle2) |
| Calculates the normalized difference between the given angles. More... | |
| CDegrees | argos::NormalizedDifference (const CDegrees &c_angle1, const CDegrees &c_angle2) |
| Calculates the normalized difference between the given angles. More... | |
| void | argos::SinCos (const CRadians &c_radians, Real &f_sin, Real &f_cos) |
| Computes the sine and cosine of the passed value in radians. More... | |
| Real | argos::Sin (const CRadians &c_radians) |
| Computes the sine of the passed value in radians. More... | |
| Real | argos::Cos (const CRadians &c_radians) |
| Computes the cosine of the passed value in radians. More... | |
| Real | argos::Tan (const CRadians &c_radians) |
| Computes the tangent of the passed value in radians. More... | |
| CRadians | argos::ASin (Real f_value) |
| Computes the arcsine of the passed value. More... | |
| CRadians | argos::ACos (Real f_value) |
| Computes the arccosine of the passed value. More... | |
| CRadians | argos::ATan2 (const Real f_y, const Real f_x) |
| Computes the arctangent of the passed values. More... | |
Macro Definition Documentation
◆ ARGOS_ACOS
◆ ARGOS_ASIN
◆ ARGOS_ATAN2
◆ ARGOS_COS
◆ ARGOS_PI
| #define ARGOS_PI 3.14159265358979323846264338327950288 |