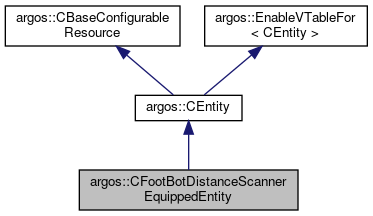
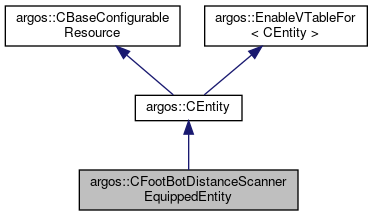
#include <footbot_distance_scanner_equipped_entity.h>
Public Types | |
| enum | EMode { MODE_OFF, MODE_POSITION_CONTROL, MODE_SPEED_CONTROL } |
 Public Types inherited from argos::CEntity Public Types inherited from argos::CEntity | |
| typedef std::vector< CEntity * > | TVector |
| A vector of entities. More... | |
| typedef unordered_map< std::string, CEntity * > | TMap |
| A map of entities. More... | |
| typedef std::multimap< std::string, CEntity * > | TMultiMap |
| A multi-map of entities. More... | |
Public Member Functions | |
| ENABLE_VTABLE () | |
| CFootBotDistanceScannerEquippedEntity (CComposableEntity *pc_parent) | |
| CFootBotDistanceScannerEquippedEntity (CComposableEntity *pc_parent, const std::string &str_id) | |
| virtual void | Reset () |
| Resets the state of the entity to whatever it was after Init() or the standalone constructor was called. More... | |
| virtual void | Update () |
| Updates the state of this entity. More... | |
| UInt32 | GetMode () const |
| void | SetMode (UInt32 un_mode) |
| const CRadians & | GetRotation () const |
| void | SetRotation (const CRadians &c_rotation) |
| Real | GetRotationSpeed () const |
| void | SetRotationSpeed (Real f_speed) |
| virtual std::string | GetTypeDescription () const |
| Returns a string label for this class. More... | |
| Public Member Functions inherited from argos::CEntity | |
| ENABLE_VTABLE () | |
| CEntity (CComposableEntity *pc_parent) | |
| Class constructor. More... | |
| CEntity (CComposableEntity *pc_parent, const std::string &str_id) | |
| Class constructor. More... | |
| virtual | ~CEntity () |
| Class destructor. More... | |
| virtual void | Init (TConfigurationNode &t_tree) |
| Initializes the state of the entity from the XML configuration tree. More... | |
| virtual void | Destroy () |
| Destroys the entity, undoing whatever was done by Init() or by the standalone constructor. More... | |
| const std::string & | GetId () const |
| Returns the id of this entity. More... | |
| std::string | GetContext () const |
| Returns the context of this entity. More... | |
| bool | HasParent () const |
Returns true if this entity has a parent. More... | |
| CEntity & | GetRootEntity () |
| Returns the root entity containing this entity. More... | |
| const CEntity & | GetRootEntity () const |
| Returns the root entity containing this entity. More... | |
| CComposableEntity & | GetParent () |
| Returns this entity's parent. More... | |
| const CComposableEntity & | GetParent () const |
| Returns this entity's parent. More... | |
| void | SetParent (CComposableEntity &c_parent) |
| Sets this entity's parent. More... | |
| ssize_t | GetIndex () const |
| Returns the entity index. More... | |
| void | SetIndex (ssize_t n_idx) |
| Sets the entity index. More... | |
| bool | IsEnabled () const |
Returns true if the entity is enabled. More... | |
| void | Enable () |
| Enables the entity. More... | |
| void | Disable () |
| Disables the entity. More... | |
| virtual void | SetEnabled (bool b_enabled) |
| Enables or disables an entity. More... | |
| TConfigurationNode * | GetConfigurationNode () |
| Returns a pointer to the configuration node that was used to create this entity. More... | |
| Public Member Functions inherited from argos::CBaseConfigurableResource | |
| virtual | ~CBaseConfigurableResource () |
| Class destructor. More... | |
| Public Member Functions inherited from argos::EnableVTableFor< CEntity > | |
| size_t | GetTagHelper (const DERIVED *) const |
Detailed Description
Definition at line 19 of file footbot_distance_scanner_equipped_entity.h.
Member Enumeration Documentation
◆ EMode
| Enumerator | |
|---|---|
| MODE_OFF | |
| MODE_POSITION_CONTROL | |
| MODE_SPEED_CONTROL | |
Definition at line 25 of file footbot_distance_scanner_equipped_entity.h.
Constructor & Destructor Documentation
◆ CFootBotDistanceScannerEquippedEntity() [1/2]
| argos::CFootBotDistanceScannerEquippedEntity::CFootBotDistanceScannerEquippedEntity | ( | CComposableEntity * | pc_parent | ) |
Definition at line 16 of file footbot_distance_scanner_equipped_entity.cpp.
◆ CFootBotDistanceScannerEquippedEntity() [2/2]
| argos::CFootBotDistanceScannerEquippedEntity::CFootBotDistanceScannerEquippedEntity | ( | CComposableEntity * | pc_parent, |
| const std::string & | str_id | ||
| ) |
Definition at line 26 of file footbot_distance_scanner_equipped_entity.cpp.
Member Function Documentation
◆ ENABLE_VTABLE()
| argos::CFootBotDistanceScannerEquippedEntity::ENABLE_VTABLE | ( | ) |
◆ GetMode()
|
inline |
Definition at line 42 of file footbot_distance_scanner_equipped_entity.h.
◆ GetRotation()
|
inline |
Definition at line 50 of file footbot_distance_scanner_equipped_entity.h.
◆ GetRotationSpeed()
|
inline |
Definition at line 56 of file footbot_distance_scanner_equipped_entity.h.
◆ GetTypeDescription()
|
inlinevirtual |
Returns a string label for this class.
- Returns
- A string label for this class.
Reimplemented from argos::CEntity.
Definition at line 64 of file footbot_distance_scanner_equipped_entity.h.
◆ Reset()
|
virtual |
Resets the state of the entity to whatever it was after Init() or the standalone constructor was called.
The default implementation of this method does nothing.
Reimplemented from argos::CEntity.
Definition at line 37 of file footbot_distance_scanner_equipped_entity.cpp.
◆ SetMode()
|
inline |
Definition at line 46 of file footbot_distance_scanner_equipped_entity.h.
◆ SetRotation()
| void argos::CFootBotDistanceScannerEquippedEntity::SetRotation | ( | const CRadians & | c_rotation | ) |
Definition at line 58 of file footbot_distance_scanner_equipped_entity.cpp.
◆ SetRotationSpeed()
|
inline |
Definition at line 60 of file footbot_distance_scanner_equipped_entity.h.
◆ Update()
|
virtual |
Updates the state of this entity.
The default implementation of this method does nothing.
Reimplemented from argos::CEntity.
Definition at line 46 of file footbot_distance_scanner_equipped_entity.cpp.