positioning_default_sensor.cpp File Reference
#include <argos3/core/simulator/simulator.h>#include <argos3/core/simulator/entity/embodied_entity.h>#include <argos3/core/simulator/entity/composable_entity.h>#include "positioning_default_sensor.h"
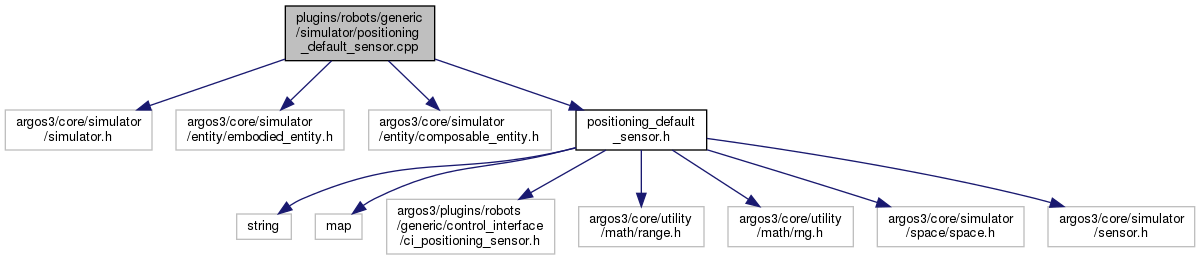
Include dependency graph for positioning_default_sensor.cpp:
Go to the source code of this file.
Namespaces | |
| argos | |
| The namespace containing all the ARGoS related code. | |
Functions | |
| argos::REGISTER_SENSOR (CPositioningDefaultSensor,"positioning","default","Carlo Pinciroli [ilpincy@gmail.com]","1.0","A generic positioning sensor.","This sensor returns the current position and orientation of a robot. This sensor\n""can be used with any robot, since it accesses only the body component. In\n""controllers, you must include the ci_positioning_sensor.h header.\n\n""REQUIRED XML CONFIGURATION\n\n"" <controllers>\n"" ...\n"" <my_controller ...>\n"" ...\n"" <sensors>\n"" ...\n"" <positioning implementation=\"default\" />\n"" ...\n"" </sensors>\n"" ...\n"" </my_controller>\n"" ...\n"" </controllers>\n\n""OPTIONAL XML CONFIGURATION\n\n""It is possible to add uniform noise to the sensor, thus matching the\n""characteristics of a real robot better. You can add noise through the\n""attributes 'pos_noise_range', 'angle_noise_range', and 'axis_noise_range'.\n""Attribute 'pos_noise_range' regulates the noise range on the position returned\n""by the sensor. Attribute 'angle_noise_range' sets the noise range on the angle\n""(values expressed in degrees). Attribute 'axis_noise_range' sets the noise for\n""the rotation axis. Angle and axis are used to calculate a quaternion, which is\n""the actual returned value for rotation.\n\n"" <controllers>\n"" ...\n"" <my_controller ...>\n"" ...\n"" <sensors>\n"" ...\n"" <positioning implementation=\"default\"\n"" pos_noise_range=\"-0.1:0.2\"\n"" angle_noise_range=\"-10.5:13.7\"\n"" axis_noise_range=\"-0.3:0.4\" />\n"" ...\n"" </sensors>\n"" ...\n"" </my_controller>\n"" ...\n"" </controllers>\n\n""OPTIONAL XML CONFIGURATION\n\n""None.\n","Usable") | |