radios_default_sensor.cpp File Reference
#include "radios_default_sensor.h"#include <argos3/plugins/simulator/entities/radio_equipped_entity.h>
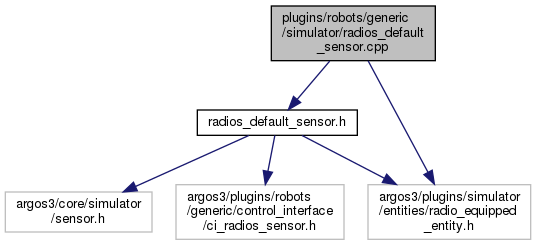
Include dependency graph for radios_default_sensor.cpp:
Go to the source code of this file.
Namespaces | |
| argos | |
| The namespace containing all the ARGoS related code. | |
Functions | |
| argos::REGISTER_SENSOR (CRadiosDefaultSensor,"radios","default","Michael Allwright [allsey87@gmail.com]","1.0","A generic radio sensor to receive messages from nearby radios.","This radio sensor implementation allows an arbitary number of messages\n""containing an arbitary number of bytes to be received from nearby robots. The\n""implementation is very basic and any concepts such as throughput, addressing,\n""or formatting of a message's contents is beyond the scope of this sensor's\n""implementation\n\n""REQUIRED XML CONFIGURATION\n\n"" <controllers>\n"" ...\n"" <my_controller ...>\n"" ...\n"" <sensors>\n"" ...\n"" <radios implementation=\"default\" medium=\"radios\" />\n"" ...\n"" </sensors>\n"" ...\n"" </my_controller>\n"" ...\n"" </controllers>\n\n""The 'medium' attribute sets the id of the radio medium declared in the <media>\n""XML section.\n\n""OPTIONAL XML CONFIGURATION\n\n""None.\n","Usable") | |