argos::CCI_RangeAndBearingSensor::SPacket Struct Reference
#include <ci_range_and_bearing_sensor.h>
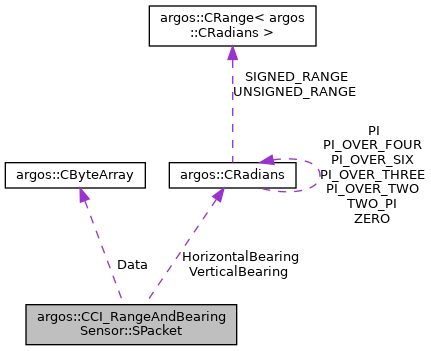
Collaboration diagram for argos::CCI_RangeAndBearingSensor::SPacket:
Public Member Functions | |
| SPacket () | |
Public Attributes | |
| Real | Range |
| CRadians | HorizontalBearing |
| CRadians | VerticalBearing |
| The vertical bearing is defined as the angle between the local robot XY plane and the message source position, i.e., the elevation in math jargon. More... | |
| CByteArray | Data |
Detailed Description
Definition at line 28 of file ci_range_and_bearing_sensor.h.
Constructor & Destructor Documentation
◆ SPacket()
| argos::CCI_RangeAndBearingSensor::SPacket::SPacket | ( | ) |
Definition at line 83 of file ci_range_and_bearing_sensor.cpp.
Member Data Documentation
◆ Data
| CByteArray argos::CCI_RangeAndBearingSensor::SPacket::Data |
Definition at line 39 of file ci_range_and_bearing_sensor.h.
◆ HorizontalBearing
| CRadians argos::CCI_RangeAndBearingSensor::SPacket::HorizontalBearing |
Definition at line 30 of file ci_range_and_bearing_sensor.h.
◆ Range
| Real argos::CCI_RangeAndBearingSensor::SPacket::Range |
Definition at line 29 of file ci_range_and_bearing_sensor.h.
◆ VerticalBearing
| CRadians argos::CCI_RangeAndBearingSensor::SPacket::VerticalBearing |
The vertical bearing is defined as the angle between the local robot XY plane and the message source position, i.e., the elevation in math jargon.
This is different from the inclination, which is the angle between the azimuth vector (robot local Z axis) and the vector to the message source. Elevation = 90 degrees - Inclination.
Definition at line 38 of file ci_range_and_bearing_sensor.h.