#include <colored_blob_omnidirectional_camera_rotzonly_sensor.h>
Public Member Functions | |
| CColoredBlobOmnidirectionalCameraRotZOnlySensor () | |
| virtual | ~CColoredBlobOmnidirectionalCameraRotZOnlySensor () |
| virtual void | SetRobot (CComposableEntity &c_entity) |
| Sets the entity associated to this sensor. More... | |
| virtual void | Init (TConfigurationNode &t_tree) |
| Initializes the sensor from the XML configuration tree. More... | |
| virtual void | Update () |
| Updates the state of the entity associated to this sensor, if the sensor is currently enabled. More... | |
| virtual void | Reset () |
| Resets the sensor to the state it had just after Init(). More... | |
| virtual void | Destroy () |
| Destroys the sensor. More... | |
| virtual void | Enable () |
| Enables updating of sensor information in the event loop. More... | |
| virtual void | Disable () |
| Disables updating of sensor information in the event loop. More... | |
| bool | IsShowRays () |
| Returns true if the rays must be shown in the GUI. More... | |
| void | SetShowRays (bool b_show_rays) |
| Sets whether or not the rays must be shown in the GUI. More... | |
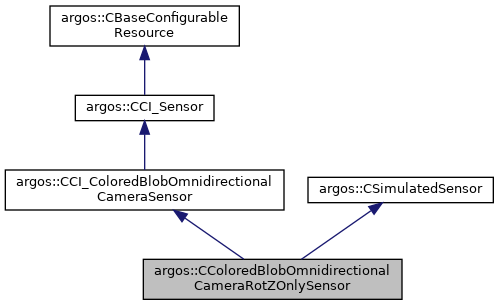
 Public Member Functions inherited from argos::CCI_ColoredBlobOmnidirectionalCameraSensor Public Member Functions inherited from argos::CCI_ColoredBlobOmnidirectionalCameraSensor | |
| CCI_ColoredBlobOmnidirectionalCameraSensor () | |
| Constructor. More... | |
| virtual | ~CCI_ColoredBlobOmnidirectionalCameraSensor () |
| Destructor. More... | |
| const SReadings & | GetReadings () const |
| Returns a reference to the current camera readings. More... | |
| Public Member Functions inherited from argos::CCI_Sensor | |
| virtual | ~CCI_Sensor () |
| Class destructor. More... | |
| bool | IsEnabled () const |
| bool | IsDisabled () const |
| Public Member Functions inherited from argos::CBaseConfigurableResource | |
| virtual | ~CBaseConfigurableResource () |
| Class destructor. More... | |
| Public Member Functions inherited from argos::CSimulatedSensor | |
| virtual | ~CSimulatedSensor () |
| Class destructor. More... | |
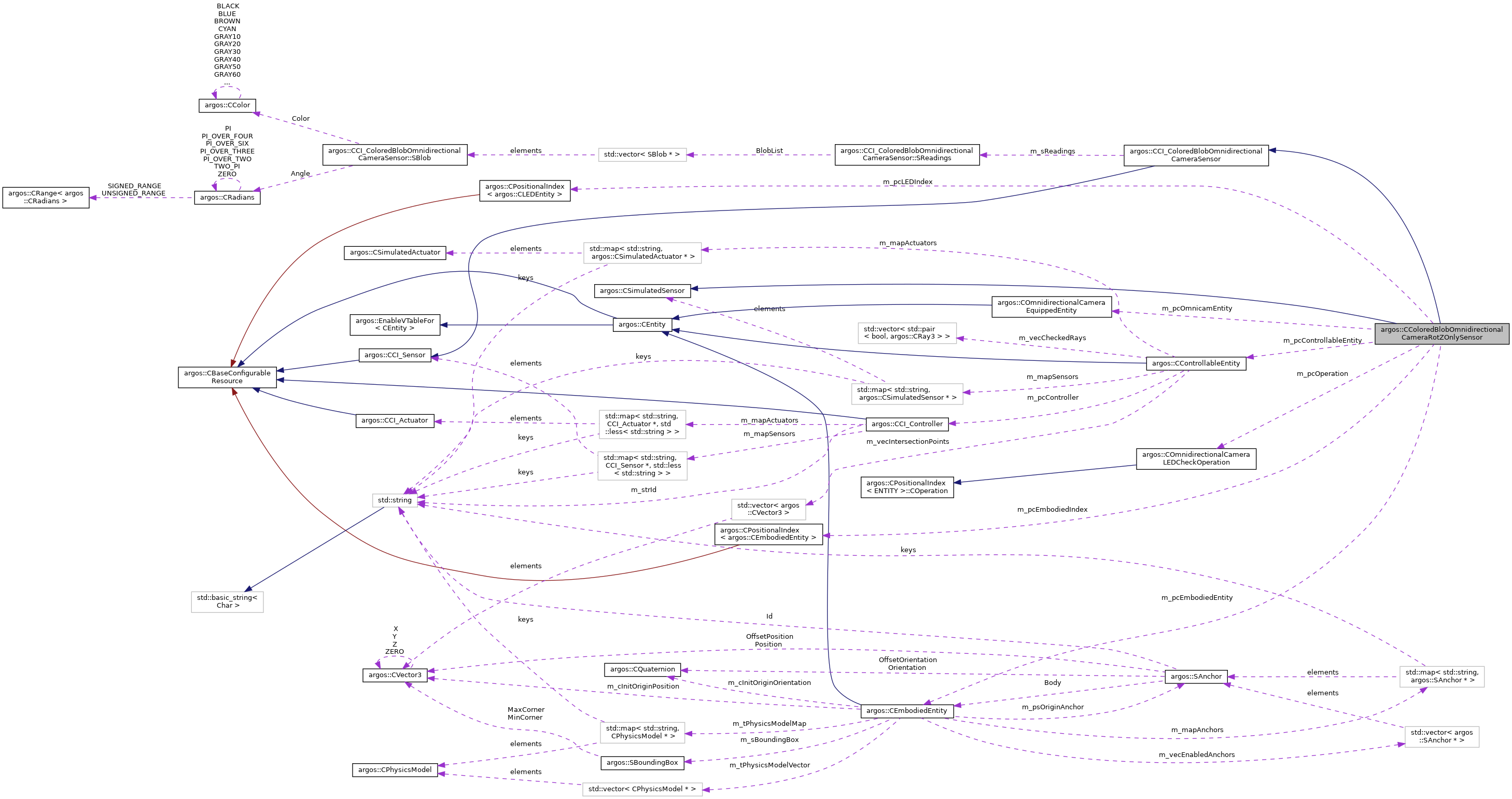
Protected Attributes | |
| COmnidirectionalCameraEquippedEntity * | m_pcOmnicamEntity |
| CControllableEntity * | m_pcControllableEntity |
| CEmbodiedEntity * | m_pcEmbodiedEntity |
| CPositionalIndex< CLEDEntity > * | m_pcLEDIndex |
| CPositionalIndex< CEmbodiedEntity > * | m_pcEmbodiedIndex |
| COmnidirectionalCameraLEDCheckOperation * | m_pcOperation |
| bool | m_bShowRays |
| Protected Attributes inherited from argos::CCI_ColoredBlobOmnidirectionalCameraSensor | |
| SReadings | m_sReadings |
Additional Inherited Members | |
| Public Types inherited from argos::CCI_ColoredBlobOmnidirectionalCameraSensor | |
| typedef std::vector< SBlob * > | TBlobList |
| Vector of pointers to colored blobs. More... | |
| Public Types inherited from argos::CCI_Sensor | |
| typedef std::map< std::string, CCI_Sensor *, std::less< std::string > > | TMap |
Detailed Description
Definition at line 19 of file colored_blob_omnidirectional_camera_rotzonly_sensor.h.
Constructor & Destructor Documentation
◆ CColoredBlobOmnidirectionalCameraRotZOnlySensor()
| argos::CColoredBlobOmnidirectionalCameraRotZOnlySensor::CColoredBlobOmnidirectionalCameraRotZOnlySensor | ( | ) |
Definition at line 122 of file colored_blob_omnidirectional_camera_rotzonly_sensor.cpp.
◆ ~CColoredBlobOmnidirectionalCameraRotZOnlySensor()
|
virtual |
Definition at line 134 of file colored_blob_omnidirectional_camera_rotzonly_sensor.cpp.
Member Function Documentation
◆ Destroy()
|
virtual |
Destroys the sensor.
This method is supposed to undo whatever was done in Init(). The default implementation of this method does nothing.
Reimplemented from argos::CCI_Sensor.
Definition at line 218 of file colored_blob_omnidirectional_camera_rotzonly_sensor.cpp.
◆ Disable()
|
virtual |
Disables updating of sensor information in the event loop.
Reimplemented from argos::CCI_Sensor.
Definition at line 233 of file colored_blob_omnidirectional_camera_rotzonly_sensor.cpp.
◆ Enable()
|
virtual |
Enables updating of sensor information in the event loop.
For some sensors, this must be called before using them, others are enabled by default.
Reimplemented from argos::CCI_Sensor.
Definition at line 225 of file colored_blob_omnidirectional_camera_rotzonly_sensor.cpp.
◆ Init()
|
virtual |
Initializes the sensor from the XML configuration tree.
The default implementation of this method does nothing.
- Parameters
-
t_node The XML configuration tree relative to this sensor.
Reimplemented from argos::CCI_Sensor.
Definition at line 152 of file colored_blob_omnidirectional_camera_rotzonly_sensor.cpp.
◆ IsShowRays()
|
inline |
Returns true if the rays must be shown in the GUI.
- Returns
- true if the rays must be shown in the GUI.
Definition at line 46 of file colored_blob_omnidirectional_camera_rotzonly_sensor.h.
◆ Reset()
|
virtual |
Resets the sensor to the state it had just after Init().
The default implementation of this method does nothing.
Reimplemented from argos::CCI_Sensor.
Definition at line 210 of file colored_blob_omnidirectional_camera_rotzonly_sensor.cpp.
◆ SetRobot()
|
virtual |
Sets the entity associated to this sensor.
When a controller is created, all the sensors and actuators are created, too. This function is called right before the Init() method of the sensor is called.
- Parameters
-
c_entity The entity to associate to this sensor.
Implements argos::CSimulatedSensor.
Definition at line 140 of file colored_blob_omnidirectional_camera_rotzonly_sensor.cpp.
◆ SetShowRays()
|
inline |
Sets whether or not the rays must be shown in the GUI.
- Parameters
-
b_show_rays true if the rays must be shown, false otherwise
Definition at line 54 of file colored_blob_omnidirectional_camera_rotzonly_sensor.h.
◆ Update()
|
virtual |
Updates the state of the entity associated to this sensor, if the sensor is currently enabled.
If it is disabled, then this function should do nothing.
Implements argos::CSimulatedSensor.
Definition at line 184 of file colored_blob_omnidirectional_camera_rotzonly_sensor.cpp.
Member Data Documentation
◆ m_bShowRays
|
protected |
Definition at line 65 of file colored_blob_omnidirectional_camera_rotzonly_sensor.h.
◆ m_pcControllableEntity
|
protected |
Definition at line 60 of file colored_blob_omnidirectional_camera_rotzonly_sensor.h.
◆ m_pcEmbodiedEntity
|
protected |
Definition at line 61 of file colored_blob_omnidirectional_camera_rotzonly_sensor.h.
◆ m_pcEmbodiedIndex
|
protected |
Definition at line 63 of file colored_blob_omnidirectional_camera_rotzonly_sensor.h.
◆ m_pcLEDIndex
|
protected |
Definition at line 62 of file colored_blob_omnidirectional_camera_rotzonly_sensor.h.
◆ m_pcOmnicamEntity
|
protected |
Definition at line 59 of file colored_blob_omnidirectional_camera_rotzonly_sensor.h.
◆ m_pcOperation
|
protected |
Definition at line 64 of file colored_blob_omnidirectional_camera_rotzonly_sensor.h.