quadrotor_speed_default_actuator.cpp File Reference
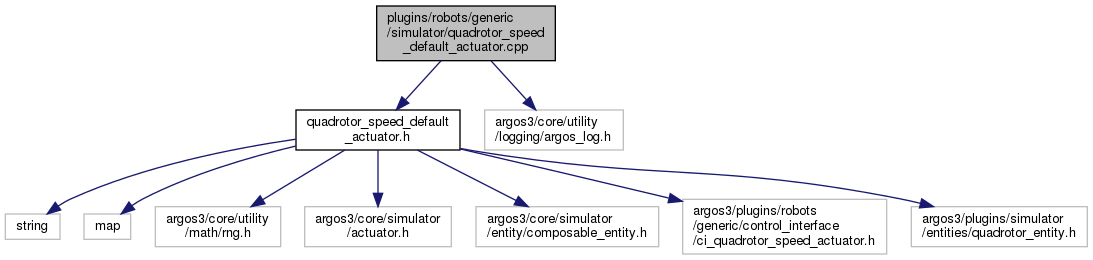
Include dependency graph for quadrotor_speed_default_actuator.cpp:
Go to the source code of this file.
Namespaces | |
| argos | |
| The namespace containing all the ARGoS related code. | |
Functions | |
| REGISTER_ACTUATOR (CQuadRotorSpeedDefaultActuator,"quadrotor_speed","default","Carlo Pinciroli [ilpincy@gmail.com]","1.0","The quadrotor speed actuator.","This actuator controls the speed of a quadrotor robot. For a\n""complete description of its usage, refer to the\n""ci_quadrotor_speed_actuator.h file.\n\n""REQUIRED XML CONFIGURATION\n\n"" <controllers>\n"" ...\n"" <my_controller ...>\n"" ...\n"" <actuators>\n"" ...\n"" <quadrotor_speed implementation=\"default\" />\n"" ...\n"" </actuators>\n"" ...\n"" </my_controller>\n"" ...\n"" </controllers>\n\n""OPTIONAL XML CONFIGURATION\n\n""None for the time being.\n\n","Usable") | |
Function Documentation
| REGISTER_ACTUATOR | ( | CQuadRotorSpeedDefaultActuator | , |
| "quadrotor_speed" | , | ||
| "default" | , | ||
| "Carlo Pinciroli " | [ilpincy @gmail.com], | ||
| "1.0" | , | ||
| "The quadrotor speed actuator." | , | ||
| "This actuator controls the speed of a quadrotor robot. For a\n""complete description of its | usage, | ||
| refer to the\n""ci_quadrotor_speed_actuator.h file.\n\n""REQUIRED XML CONFIGURATION\n\n""< controllers >\n""...\n""< my_controller...>\n""...\n""< actuators >\n""...\n""< quadrotor_speed implementation=\"default\" />\n"" ...\n"" </actuators>\n"" ...\n"" </my_controller>\n"" ...\n"" </controllers>\n\n""OPTIONAL XML CONFIGURATION\n\n""None for the time being.\n\n" | , | ||
| "Usable" | |||
| ) |