argos::CDynamics2DDifferentialSteeringControl Class Reference
#include <dynamics2d_differentialsteering_control.h>
Inheritance diagram for argos::CDynamics2DDifferentialSteeringControl:
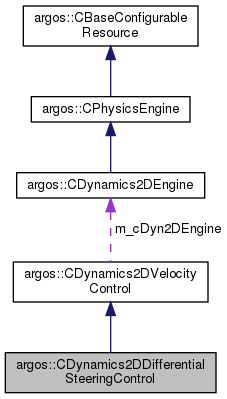
Collaboration diagram for argos::CDynamics2DDifferentialSteeringControl:
Public Member Functions | |
| CDynamics2DDifferentialSteeringControl (CDynamics2DEngine &c_engine, Real f_max_force, Real f_max_torque, Real f_interwheel_distance, TConfigurationNode *t_node=NULL) | |
| virtual | ~CDynamics2DDifferentialSteeringControl () |
| void | SetWheelVelocity (Real f_left_wheel, Real f_right_wheel) |
| Real | GetInterwheelDistance () const |
 Public Member Functions inherited from argos::CDynamics2DVelocityControl Public Member Functions inherited from argos::CDynamics2DVelocityControl | |
| CDynamics2DVelocityControl (CDynamics2DEngine &c_engine, Real f_max_force, Real f_max_torque, TConfigurationNode *t_node=NULL) | |
| virtual | ~CDynamics2DVelocityControl () |
| void | AttachTo (cpBody *pt_body) |
| void | Detach () |
| void | Reset () |
| CVector2 | GetLinearVelocity () const |
| void | SetLinearVelocity (const CVector2 &c_velocity) |
| Real | GetAngularVelocity () const |
| void | SetAngularVelocity (Real f_velocity) |
| Real | GetMaxForce () const |
| Real | GetMaxTorque () const |
Additional Inherited Members | |
| Protected Attributes inherited from argos::CDynamics2DVelocityControl | |
| CDynamics2DEngine & | m_cDyn2DEngine |
| cpBody * | m_ptControlBody |
| cpBody * | m_ptControlledBody |
| cpConstraint * | m_ptLinearConstraint |
| cpConstraint * | m_ptAngularConstraint |
| Real | m_fMaxForce |
| Real | m_fMaxTorque |
Detailed Description
Definition at line 19 of file dynamics2d_differentialsteering_control.h.
Constructor & Destructor Documentation
| argos::CDynamics2DDifferentialSteeringControl::CDynamics2DDifferentialSteeringControl | ( | CDynamics2DEngine & | c_engine, |
| Real | f_max_force, | ||
| Real | f_max_torque, | ||
| Real | f_interwheel_distance, | ||
| TConfigurationNode * | t_node = NULL |
||
| ) |
Definition at line 14 of file dynamics2d_differentialsteering_control.cpp.
|
inlinevirtual |
Definition at line 29 of file dynamics2d_differentialsteering_control.h.
Member Function Documentation
|
inline |
Definition at line 34 of file dynamics2d_differentialsteering_control.h.
| void argos::CDynamics2DDifferentialSteeringControl::SetWheelVelocity | ( | Real | f_left_wheel, |
| Real | f_right_wheel | ||
| ) |
Definition at line 25 of file dynamics2d_differentialsteering_control.cpp.